Welcome to our robot’s home!
The difficulty of service robotics is related to the environment: robots operate in a changing and complex environment and have to interact with it and its occupants.
As the goal of the robocup@home is to move robotics forward and help to develop new applications in the real world, we wanted to work in an environment as real as possible.
The problem was twofold: to create an apartment environment and to provide workspaces for robotics students. So we transformed our 2 robotics room (~60m²) to find an hybrid between staying true to a real apartment and optimizing space to allow several groups of students to work on robotics projects.
The first room is more focused on the presentation of robotics projects carried out internally (autonomous wheelchair, Baxter project…) and also offers several workspaces.

We transformed one of the two rooms into an apartment while incorporating some workspaces.
The idea was to transform this:

Into that:
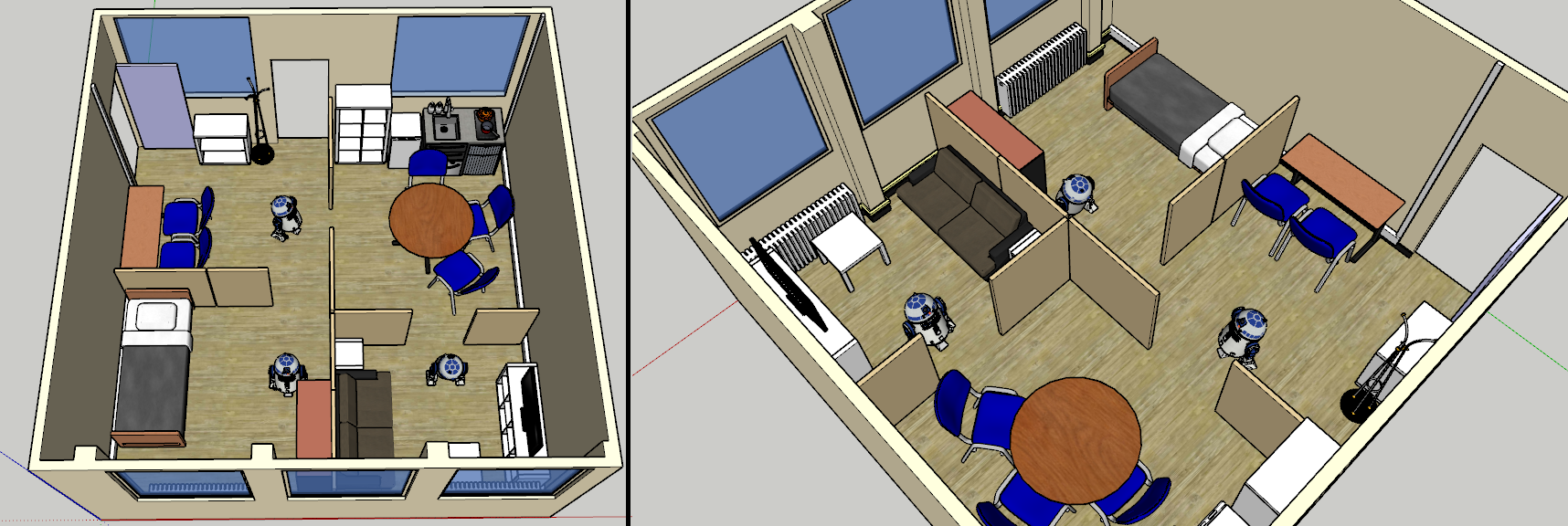
Even if the space is rather small (~30m²), it provides all the usefull area:
- a kitchen area
- a lounge area
- a sleeping area
- an entrance area
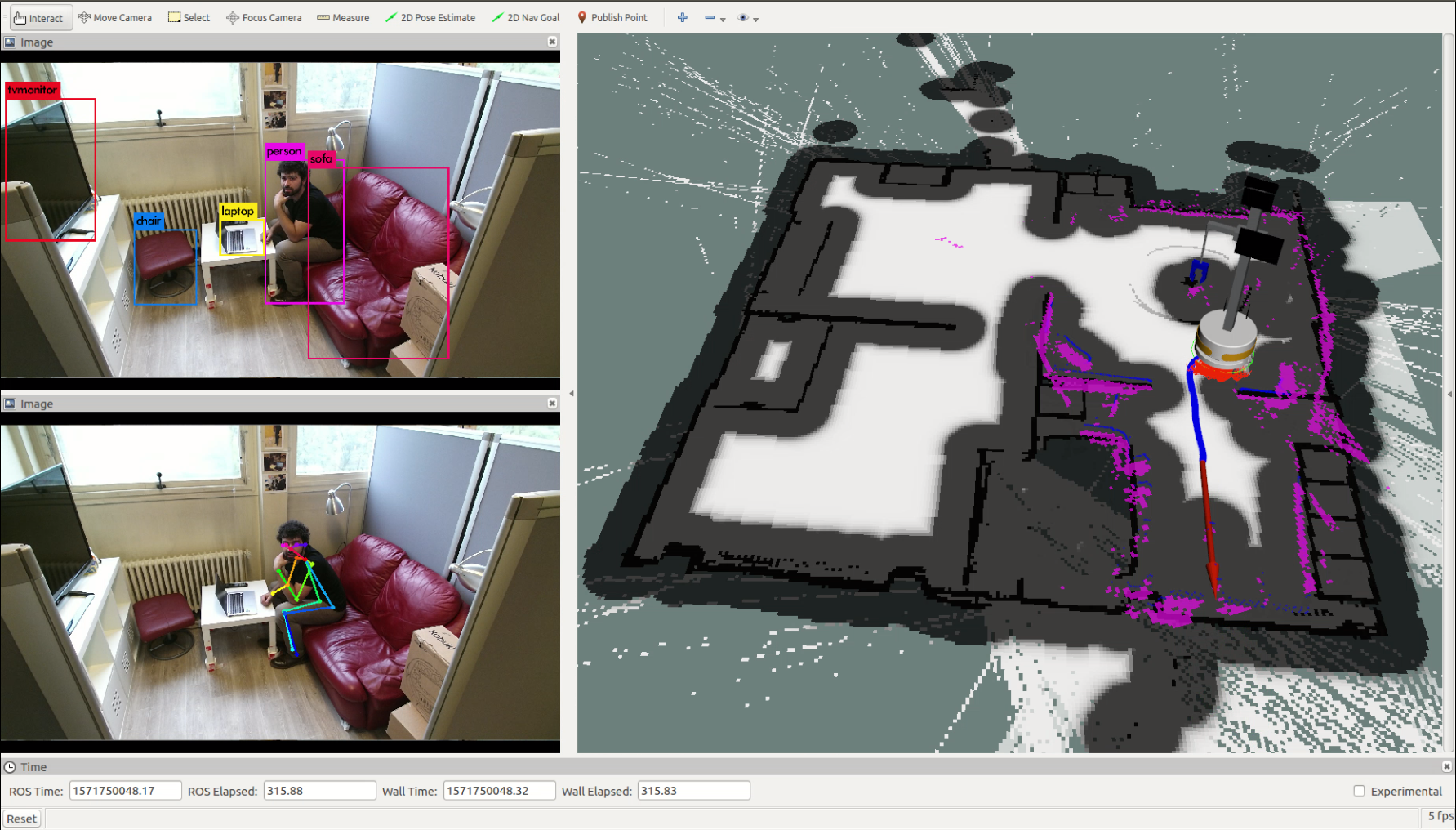
Specific scenarios can be associated with each of this spaces (receptionist, kitchen actions…). It also allows us to use our dataset in its real environment and therefore to improve our achievements and challenge their limits in a concrete case.
We still have some things to do in this space but our OPL robot palbator has already been able to do its first autonomous navigation and reconnaissance tests in the arena!
To be continued…