Contributions
Software contributions
Our main GitHub repository pointing to every other repository as submodule is available HERE !
Here are some of the submodules :
-
General Manager : we developed a general orchestrator allowing the robot to coordinate its capacities (navigation, perception, interaction) and make decision on defined scenario.
-
Navigation Manager : this functionality provide a set of navigation strategy depending on the observed context. Regarding to the context (lots of people, complex environment, large free space zone), the robot changes it way of navigation.
-
People Manager : We developed a framework that allows the extraction of high-level person features from a 2D camera in addition to tracking people over time. The proposed people management framework aggregates body and person features including an original pose estimation using only a 2D camera. At this time, people pose and posture, clothing colors, face recognition are combined with tracking and re-identification abilities.
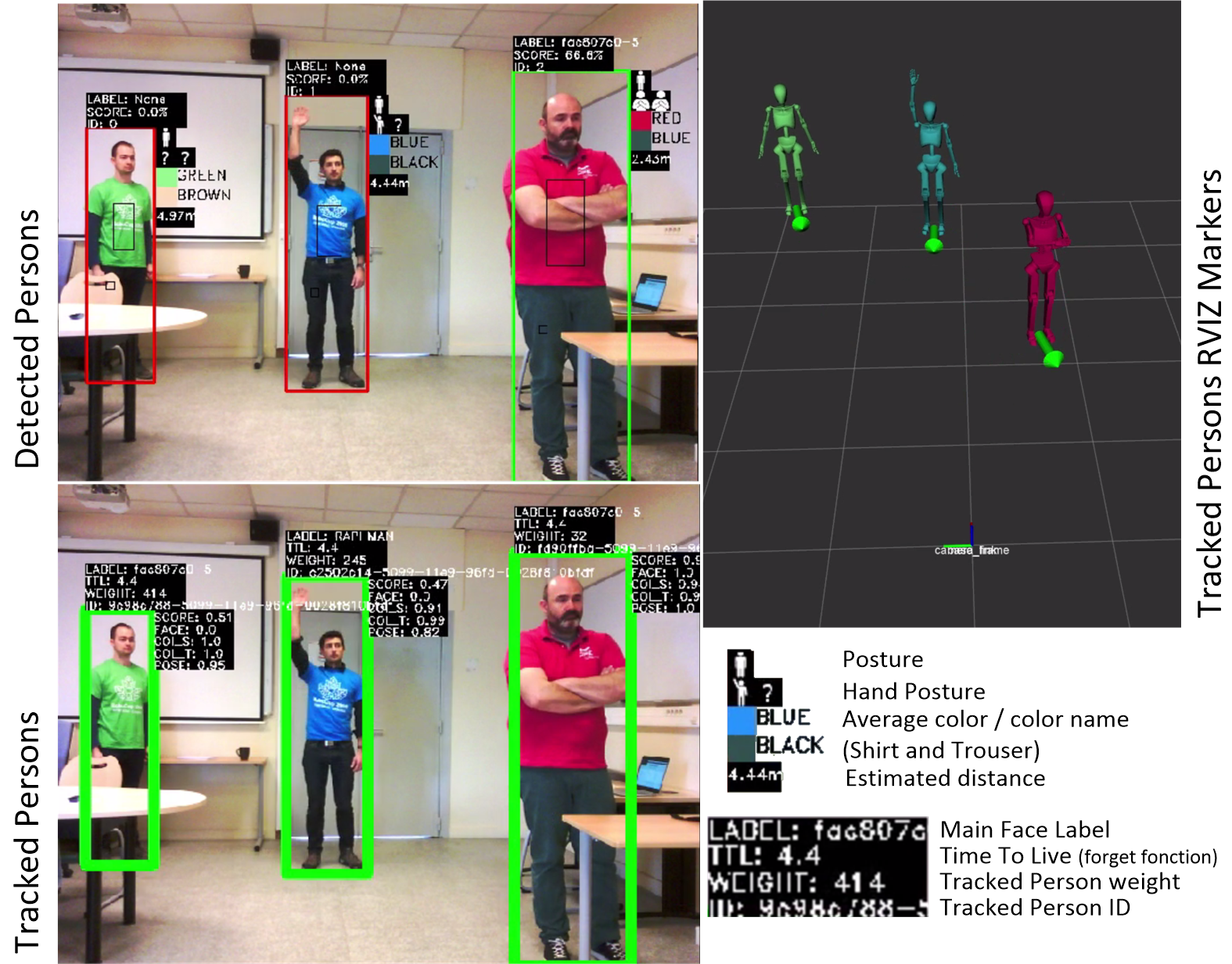
This framework includes the following additional contributions:
- Face recognition : a solution was developed to automatically catch face and learn it for future detection.
- Color detection : we extract main colors of a given picture (e.g t-shir, trousers) based on HSV format and K-mean clustering
- Pose detection : based on the OpenPose data, we build a pose extractor gives us the estimate pose (stand, sit, lying down, left or right arm up,…) and distance estimation
Previous results and works around RoboCup
LyonTech is composed by former members of CPE Lyon team and by former candidates for Robocup organization:
- LyonTech team : 2nd place at Robocup@home SSPL OnLine, World 2021
- LyonTech team : 6th place at Robocup@home OPL OnLine, World 2021
- LyonTech team : 3rd place at Robocup@home SSPL Sydney, AUSTRALIA, 2019
- LyonTech team : 5th place at Robocup@home SSPL Montreal, CANADA, 2018
- CPE Robot Forum team (including Jacques Saraydaryan, Raphael Leber, Fabrice Jumel) : 15th place at Robocup@home OPL Leipzig, Germany, 2016
-
Lyon CPE team (including Jacques Saraydaryan, Fabrice Jumel): 3rd place at Robocup@work, Joao Pessoa, Brazil, 2013
- Lyon city and INSA candidated for the organization of the Robocup, in 2016 (co-led by Olivier Simonin from Chroma/CITI team).
- Fabrice Jumel (CPE Lyon/CITI) is a Robocup@home evangelist for France
- He is OC member of RoboCup@Home since 2017.
- He was OC chair and co-chair in 2018-2020 and TC of RoboCup@Home in 2017-2018
- He is member as the organisation commitee for application of Bordeaux for Robocup 2020
- He was the Organizer of a French @home open (first edition 24, 25th January 2018 in Lyon).
- He was OC for Robocup@home SSPL in Nagoya and Montreal and OC for Robocup@home LARC in Recife.